|
We
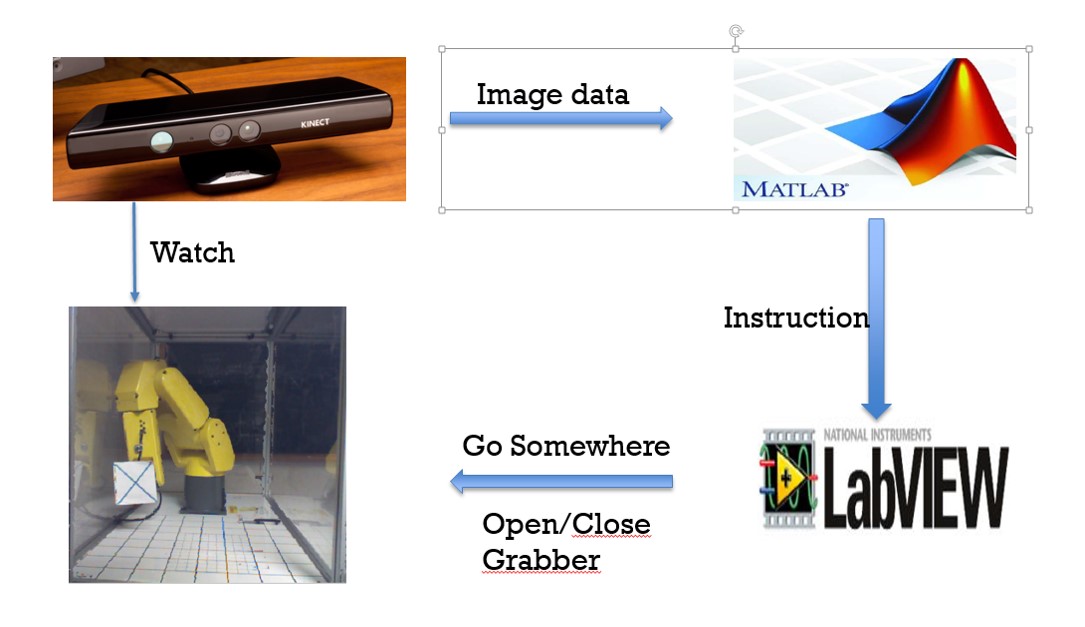
use Matlab to
acquire image data from Kinect Camera (3-D camera). And then, with the help of Matlab we
did some image processing and one-to-one mapping. After finding the correct
location where the robot should execute a picking, we use Matlab to
send this data to LabVIEW. By the communication between LabVIEW and Robot,
Robot can implement an expected picking.
|
